
Galerija

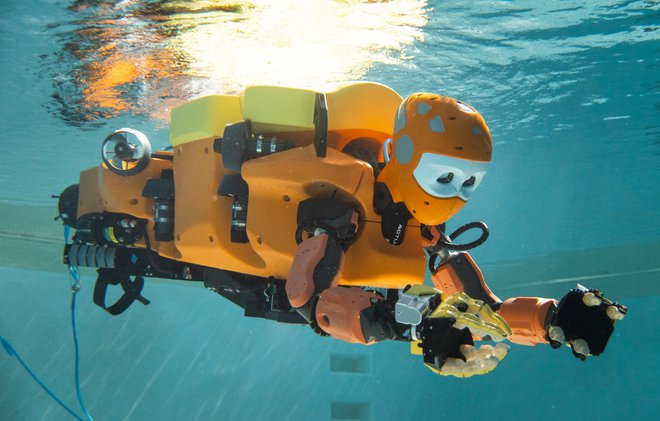
Oussama Khatib je profesor robotike na Univerzi Stanford. Njegov zadnji robot OceanOneK se je potopil skoraj tisoč metrov globoko, kjer je raziskoval potopljeno ladjo in odkrival davno pozabljene arheološke zaklade. Posebne funkcije robota omogočajo njegovim operaterjem, da čutijo, kot da bi bili oni sami globoko pod vodo.
Oussama Khatib je bil v Ljubljani na mednarodni konferenci o robotski kinematiki, ki jo od leta 1988 organizira nekdanji direktor Instituta Jožef Stefan dr. Jadran Lenarčič. Ameriški profesor sirskega rodu je ključno prispeval k razvoju človeku prijaznih robotov. Roboti zdaj postajajo naši služabniki, spremljevalci in sodelavci in ključno je vprašanje, kako zagotoviti, da robot ne bo poškodoval človeka oziroma da bo zmogel preprečiti poškodbo človeka.
Začeli smo z eno robotsko roko. V industriji je bila in je v ospredju natančnost, prvi robot je bil težak in zajeten, a v strukturiranem in nadzorovanem okolju je lahko tak. Zdaj pa že ustvarjamo robote, ki bodo v naših domovih in bodo v neposrednem stiku z ljudmi, zato je v ospredju varnost. Kako torej ustvariti varne robote, sposobne opravljati najrazličnejša dela?
Če pogledamo ljudi, nismo zelo natančni – če vam rečem, da predmet premaknete za deset centimetrov, ga boste premaknili za približno deset centimetrov. Vendar pa smo zelo prilagodljivi, imamo kopico čutil. Takšni morajo biti tudi roboti. Zdaj imamo končno tehnologijo, da bodo mehki roboti »inteligentnejši«, da bodo brez težav opravljali najrazličnejša dela, saj se bodo prek zaznaval lahko prilagajali.
Gradimo celotno arhitekturo za takšne robote, ki ima več plasti. Prva je krmiljenje, naslednja so veščine, potrebne za izvedbo načrta. Večinoma se ukvarjamo s funkcionalno avtonomijo, to je na primer navigacija po prostoru, premikanje robota, prijemanje predmetov. Za zdaj še nismo pri kognitivni avtonomiji, še vedno je nujen človeški vmesnik. Tak je na primer tudi naš podvodni robot OceanOneK, ko mu z upravljanjem zagotovimo izvedbo in uspeh. Najprej smo upravljali preproste, nato vse bolj kompleksne robote, kot je bil humanoidni robot Asimo, nadalje smo razvili nadzor na daljavo. Če bi želel, bi lahko zdaj robota OceanOneK v Jadranu nadzoroval iz Ljubljane. Razvili smo precej novih modelov, da je to mogoče.
Roboti lahko gredo na kraje, ki so nevarni za ljudi, pod vodo, v ogenj, vesolje, počnejo lahko stvari, ki jih ljudje ne moremo, a hkrati nam je omogočeno, da prek senzorjev vidimo in čutimo to, kar dela robot. Ko upravljam robota OceanOneK, da se dotakne morskega dna, lahko to čutim.
Delujemo tudi v medicini in na drugih področjih, toda glavni koncept našega dela je, da je človek povezan s strojem. Robot človeka ne nadomešča, tako kot mi potrebujemo robote, oni potrebujejo nas.

Da. Mislim, da se dogaja velika preobrazba razvoja robotike. V preteklosti so bili v ospredju industrijski roboti, kjer smo izključili ljudi, robote pa izolirali. Zdaj pa vstopajo v domove, na delovna mesta, posledično moramo predvsem zagotoviti varno interakcijo. Obstajati morajo ustrezni vmesniki med ljudmi in roboti, robot mora biti sposoben sporočiti svojo namero, na drugi strani pa mora biti tudi človek robotu ustrezno berljiv.
To ustvarja veliko družbenih vprašanj, kako naj bo komunikacija med robotom in človekom prijazna in dobra. Zato sodelujemo s humanisti, družboslovci, umetniki. Ustanavljamo nov center, stanfordski robotski center, ki bo prostor za sodelovanje. Robotika je zelo široka, multidisciplinarna, raziskave potekajo v najrazličnejših smereh. Resnično si prizadevamo, da bi izboljšali življenje ljudi in tudi za prihodnje rodove ohranili naš planet. To so naši cilji.
Upam, da ne. Mislim, da je preveč špekulacij o UI in da se od nje preveč pričakuje. Marsikaj je trenutno prenapihnjeno, kar tudi vzbuja strah med ljudmi. Z nekaterimi napovedmi ustvarjalcev UI se ne strinjam.
Generativna UI ni zares inteligentna. Če prosite chatgpt, da nariše neko sliko, to lahko naredi, ker uporabi zbrane podatke, jih združi in premeša. Je to inteligentno? Nikakor še nismo pri tem, da bi UI razmišljala, sklepala. Imamo pa veliko podatkov na internetu in zmogljive računalnike, kar omogoča ustvarjanje novih aplikacij, hkrati pa tudi napak. Ideja je, da razširimo svoje zmogljivosti, hitreje najdemo odgovore, hitreje raziskujemo. Na žalost se vse to lahko uporabi tudi za zlonamerna dejanja.
Pri robotiki nas skrbi, da bi stroj poškodoval človeka, to želimo preprečiti. Zagotoviti želimo preprosto, intuitivno komunikacijo med človekom in strojem. Želimo, da bi bil robot občutljiv za dotik, za fizično delo in interakcijo potrebujemo taktilne in druge senzorične informacije. Robotika napreduje, ker z digitalnimi tehnologijami ustvarjamo nove materiale in nove metode izdelave, tega v preteklosti nismo imeli. Zato pričakujem še naglejši razvoj, vendar mora biti v skladu z etiko. Težavno je, ker gre za odnos med človekom in strojem, kot na primer pri avtonomnih vozilih v urbanih središčih, kjer so tudi pešci. Brez težav si predstavljam avtonomno vožnjo na avtocestah, v urbanih središčih pa bodo ti avtomobili imeli stik s človekom. Skratka, nujno je, da je tehnologija narejena etično, da pomaga ljudem. To pa je mogoče le s pravo politiko.
Dogajanje je precej pestro, robotiki imamo veliko konferenc o etičnih vprašanjih, razprave so se še bolj razplamtele, odkar je v ospredju UI. Vendar javnost sliši samo za kakšne skrajne primere, ko ta vprašanja niso rešena. Resnično pa verjamem, da se raziskovalna skupnost zaveda pomembnosti teh razprav in rešitev.
Vzporednice lahko vlečemo z okoljem, kjer je toliko izzivov. Države imajo zelo različne vrednote, kratkoročne postavljamo pred dolgoročne, ne vprašamo se, kako lahko to vpliva na naslednjo generacijo. Smo v težkem obdobju, a tudi zelo obetavnem. Tehnologija napreduje, zdaj potrebujemo prave politike in izobražene ljudi.
Obstajajo velike priložnosti. Miniaturizacija prinaša orodja za operacijo v možganih. Imam majhnega, drobnega robota. Spravim ga v možgane in ga poganjam z magnetom od zunaj. Robot se premika in tako rešujemo življenje. Robotika že zdaj vsak dan rešuje življenja v medicinskih aplikacijah. Pa seveda pomoč v proizvodnji in industriji. Roboti namesto nas opravljajo težka dela.
Največ izzivov prinaša premik iz kontroliranega (industrijskega) sveta v naš vsakdan. Ta svet ni zasnovan za robota. Medtem ko smo v industriji okolje prilagodili robotom, moramo zdaj robote prilagoditi okolju. Robot se poskuša premakniti, pa je nenadoma na njegovi poti predmet, ki ga prej ni bilo – nanj mora ustrezno in pravočasno reagirati. To so ti izzivi. Nikakor ne moremo dobro delujočega robota iz industrije le preseliti v drugo okolje, saj tam ne bo deloval. Zato potrebujemo več zaznaval, nove mehanizme. Omenil sem, da je robotika multidisciplinarna, potrebujemo gradbenike, elektrotehnike, računalnikarje, humaniste ... Izziv je izobraziti novo generacijo, ki razume vse razsežnosti problemov v robotiki in je odprta za sodelovanje in delo v različnih disciplinah. Znanje z ozkega področja nikakor ne bo dovolj.
Potem ko sem oblikoval Romea in Julijo (mobilni robotski roki), sem sodeloval pri razvoju humanoidnega robota Asimo. Zanj sem razvijal rešitve, da se je lahko izognil trčenju in se v realnem času premikal na naš ukaz. Tako smo dobili robota, s katerim smo lahko komunicirali in je bil v interakciji z ljudmi. Celotna teorija je bila pripravljena in pomislil sem, da v vodi nimamo ničesar podobnega.
Bistvo razvoja podvodnega robota je bilo, kako posnemati človeško gibanje. Analizirali smo skelet in mišice človeka. Najprej je bil naš cilj, da se robot spusti na 100 metrov globine, nato smo želeli še globlje, kamor potapljači ne morejo, najprej na 340, nato na 500, nazadnje na 1000 metrov globine. Zdaj bi lahko šli tudi že na 5000 metrov globine. To je edini tak robot na svetu.
On je del naše prihodnosti. Naše življenje je odvisno od oceanov. Razviti moramo orodja, da jih ne bomo uničevali. Zdaj po dnu vsevprek kopljejo z buldožerji, da se dokopljejo do dragocenih materialov, industriji je pravzaprav vseeno, kako opravljajo dela, mi raziskovalci moramo ponuditi prava orodja.
Zelo sem bil vesel, ko je nam je uspelo rešiti vse izzive delovanja pod vodo, kot je na primer visok pritisk. Hkrati pa so vsi ti algoritmi in mehanizmi uporabni za kakršnega koli robota, naj bo to robotska roka, humanoidni robot ali robot potapljač. Razvili smo koncept haptične interakcije, da lahko prek robota čutimo, seveda tudi slišimo in vidimo, kar pomeni, da je občutek, kot da smo tam z njim.
Pravzaprav ne maram robotov, ki so preveč podobni ljudem. Vendar se na drugi strani podobnostim ne moremo izogniti. Robot z eno roko ne more kaj dosti prijeti, za držanje potrebujemo dve roki, za stereovid dve očesi. Človeško telo, sploh zgornji del, je popolno oblikovano.
OceanOneK v resnici ni humanoid, saj smo zajeli le zgornji del človeškega telesa. Lahko bi ga naredili tudi brez obraza, da bi kamere preprosto namestili na ogrodje, vendar potrebujemo oklep, ki plava, zato smo skorajda morali imeti glavo, da so kamere in drugi mehanizmi zaprti. Oblikovalci so mu nadeli obraz igračarskih robotov, dolgo je trajalo, da sem ta obraz sprejel. Želel sem si, da bi bil nežen, ne grozeč, da je potapljačem, ki se potapljajo z njim, všeč, da vzbuja zaupanje.

Gre za lahke materiale, posebna olja, dlani, ki se premikajo. Ko ga upravljam, ne razmišljam o robotu, ampak samo o svoji roki. Kar naredim, temu bo robot sledil. To je skoraj čarobno. Ko robot nekaj prime, to začutim, kar nato poveča natančnost, previdnost. To je edinstven robot na svetu, veliko je bilo napisanega o njem in naših odpravah. Veliko ljudi je zelo navdušenih nad njim in me vseskozi sprašujejo, kam bomo šli naslednjič.
Razmišljamo, da bi naredili več kopij robota OceanOneK, no, naslednjo generacijo, s katerimi bi raziskovali Antarktiko, jezero Titikaka, Baltik ... Delovanje na daljavo želimo še izpopolniti, neverjetno je, da je robot lahko daleč stran, pa lahko čutimo, česa se dotika.
Po vsem svetu imamo mrežo observatorijev za opazovanje vesolja. Podobno mrežo potrebujemo za oceane. Mislim, da jo zdaj lahko izdelamo, da raziskovalcem lahko ponudimo potrebna orodja. Robote bi namestili na različna kritična območja in z njimi preučevali stanje morja pa, denimo, kable, po katerih tečejo naše komunikacije, s temi roboti lahko popravljamo podvodne strukture. Menim, da so oceani trenutno najbolj neverjetna območja za raziskovanje.
S podobno mrežo robotov bi lahko povezali še marsikaj, na primer bolnišnice z ambulantami v odročnih vaseh. Moja vizija je, da bi strokovnjake povezali z roboti, ki bi nato pomagali poškodovanim. Potencial je ogromen, vendar so tu veliki infrastrukturni izzivi. Resnično verjamem v povezljivost z robotom, torej, da bomo sčasoma morda lahko začeli delati veliko stvari tako, da se bomo fizično povezali z njim, se prek njega dotikali in čutili stvari. Tako bomo prek tega robota opravili delo na daljavo. Pri tem pa je seveda ključno, da je poskrbljeno za varnost.


Komentarji